
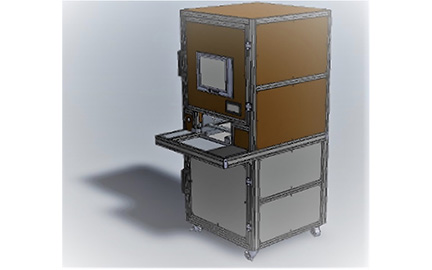
ワーク印刷機
搬送治具にセットされた円柱状ワークの底面と側面にスタンプ式印刷機で識別番号を転写し、最終工程でUV照射してインクを硬化定着させる装置。

搬送治具にセットされた円柱状ワークの底面と側面にスタンプ式印刷機で識別番号を転写し、最終工程でUV照射してインクを硬化定着させる装置。
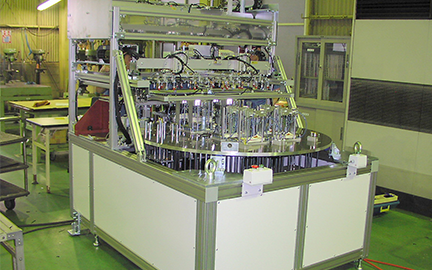
本装置は、リング状ゴム製品成形後に外観上バリや傷がないかを検査する装置になります。効率よく検査できるよう、一度に複数(10~20個)を同時に、しかも表面・裏面を一度に撮像・検査します。

作業者が安全域で投入したワークを1本づつ加工機のローダー取出し位置まで搬送し、加工後のワークを自動搬送しながらストックする装置。

デパレタイズハンドによる落下防止機構

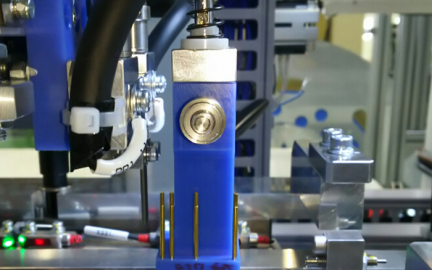
ボール型のパーツフィーダーと直進型のパーツフィーダーをつなぎ合せたことで数種類のワークを段替え無しで送り、向きを一定にすることに成功
次工程の機械を停止させることなく、供給できるようにした。

同時に何setも成型できるようにした。
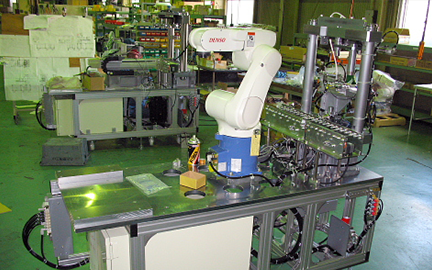
圧入はプレス機で行い、打込み面への変換は多関節ロボットを使用したことで、労力を省け安定を保つことができた。
目視や電極をあてるなど、人が行っていた作業を自動化。生産効率に影響を及ぼさないように、搬送途中に検査工程を設け、見落しや電極のあて忘れをなくした。

3種類の100kg程度の重量製品の検査効率を上げるため、搬送中に姿勢を制御したいという要望に対して、段替えの手間の軽減や繰返しの精度を向上させた機構を提案。