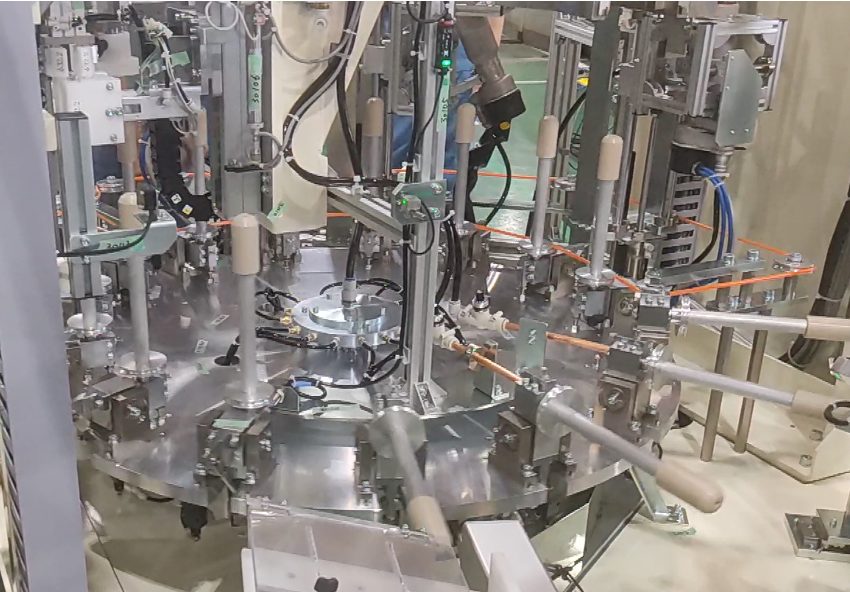
キャップシュリンク機
キャップ付き樹脂容器にキャップシュリンク包装する装置です。ツマミ・ミシン目を入れることも可能。

キャップ付き樹脂容器にキャップシュリンク包装する装置です。ツマミ・ミシン目を入れることも可能。
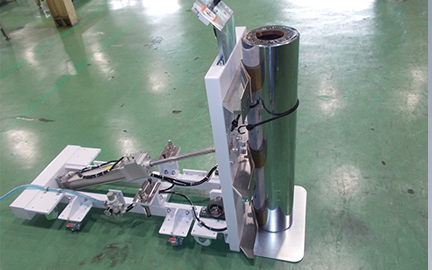
静電防止ソリジュールの導入と除電器の併用により、静電気を効果的に制御

2-8分割対応の放射状カットシステムで効率的な果物加工を実現

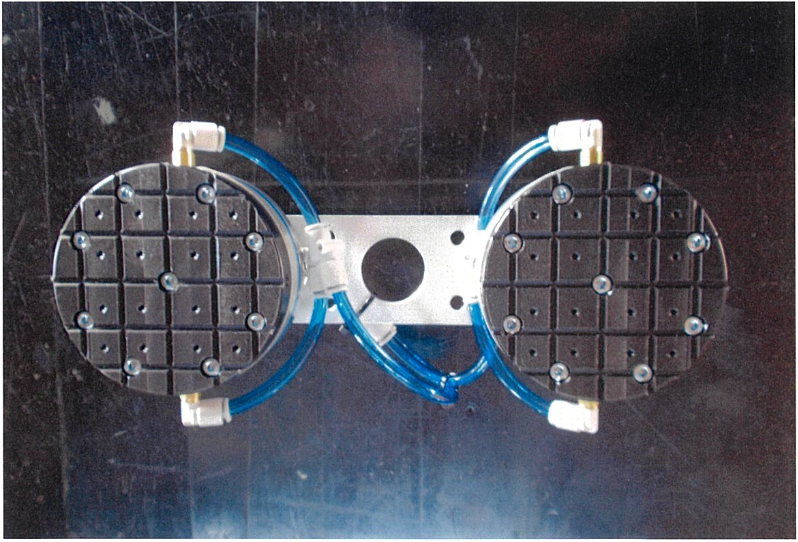
微量な振動を検知・確認するために、安定性を持ち、多数の形状で試験ができる機能を持った装置(治具)がほしいという要望に対して、機能を満たした装置を提供。

紙揃えストッパとは印刷の加工工程において処理された紙が排出される際、正確に整列させて積上げるための装置です。 この機構は紙を揃え、紙位置を確定させる役割を果たし、効率的な生産を支えます。
足腰に負担がかからない装置の開発
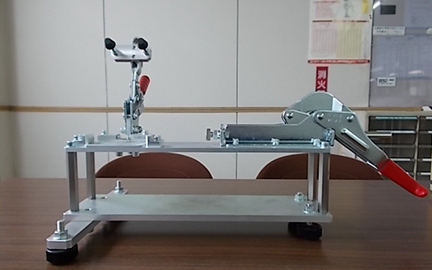
誰が作業しても簡単で間違わない構造を実現

インサート打抜装置 打抜装置とは 打抜装置とは、一般的に板状の材料から穴や形状を打ち抜くための機械です。 様々 …
ワークがプッシャーにくっつくことを解消するために、プッシャー先端に剥離(分離)用のエアブローを設けた。生産数を管理するために、現行機には付いていなかった「計数カウンター」を提案し、操作盤に設置して見える化した。

ボール型のパーツフィーダーと直進型のパーツフィーダーをつなぎ合せたことで数種類のワークを段替え無しで送り、向きを一定にすることに成功