
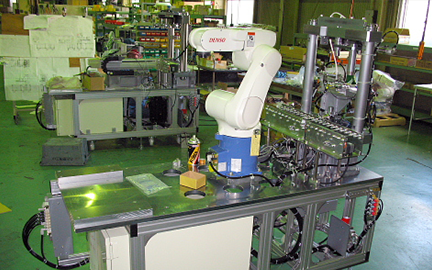
ワーク移載装置
作業者が安全域で投入したワークを1本づつ加工機のローダー取出し位置まで搬送し、加工後のワークを自動搬送しながらストックする装置。

作業者が安全域で投入したワークを1本づつ加工機のローダー取出し位置まで搬送し、加工後のワークを自動搬送しながらストックする装置。

デパレタイズハンドによる落下防止機構
圧入はプレス機で行い、打込み面への変換は多関節ロボットを使用したことで、労力を省け安定を保つことができた。

3種類の100kg程度の重量製品の検査効率を上げるため、搬送中に姿勢を制御したいという要望に対して、段替えの手間の軽減や繰返しの精度を向上させた機構を提案。

20m超のガントリーローダを製作・工場内で試運転調整まで終えてから現地据付まで一貫して対応

人手でホースを曲げているが、製品品質が均一にならないという課題に対して、クランプ付専用治具使用による製品均一化を提案。