
| 機構 | 機能 | 画像 |
| ロボットアーム | ホースを把持し、曲げるためのアームです。 関節を備えたアームで、先端にホースを把持するためのグリッパーが取り付けられています。 長尺ホースを、順次クランプ位置をずらしながら把持していくのに有効です。 |
 |
| 加熱機構 | ホースの可塑性を向上させるため、ホース全体を加熱します。 ヒータ、回転機構、開閉機構、集電装置で構成され、順次加熱完了したワークをロボットアームに供給します。 集電装置には無限回転や各加熱器毎の温度調節の高精度化に対応するため多極スリップリングを採用しています。 |

|
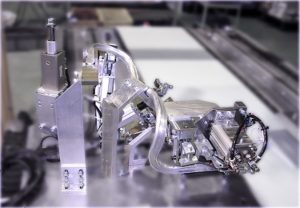
| 曲げ治具 | 3次元の複雑な形状を、型に沿って曲げていくための金型治具。 金型(半割れ)、クランプシリンダ、冷却エア回路から構成されます。 型に沿って曲げながら、型からホースが外れないよう順次クランプしていきます。 2台の治具が柵越しに交互にスライドすることで、人手による安全な取出しと、ロボット動作の中断時間短縮を両立しています。 |
 |
| 制御装置 | ロボットアームの動きを制御するための装置。 ロボットコントローラ・PLCなどで構成され、ロボットアームの動作や各機構を制御しています。 品番・曲げ動作はタッチパネルから切替でき、段替え作業は曲げ治具型替えのみとなります。 |
