産業用ロボットは、製造業をはじめとする多くの産業分野で使用されており、生産性の向上に役立ちます。中でも、ロボットハンドは生産効率や品質に大きく影響を与える部分です。本記事では、ロボットハンドの種類や特徴について解説し、選び方についてもご紹介します。
・把持ハンド
指を開閉させて物体を把持するロボットハンドです。アームの関節部に設置されたサーボモーター等によって、ツメを動かします。強い把持力と複雑な形状の物体を掴める点が特徴です。
・吸着ハンド
パッド内を真空状態にして、ワークを吸い付けて運搬します。スイッチのON/OFFだけでワークの吸着・切り離しをスピーディーに行える点が特徴です。
・磁力ハンド
電磁石の磁力でワークを密着させて運搬します。構造がシンプルな反面、磁性体でないと持ち上げられないという特徴があります。

2.把持ハンドの種類と特徴
産業用ロボットハンドの種類と特徴は以下の通りです。
エアチャック
一般的に、空気圧で動作する装置をエアチャックと呼びます。空気圧の大きさを変えることで、把持力を調整できる点が特徴です。構造がシンプルでメンテナンスが容易ですが、油圧と比較して把持力が小さい傾向にあります。
油圧チャック
油圧チャックとは、油圧の力を利用してロボットハンドの先端を開閉する装置です。空気圧と比較して、油圧は圧力が高いため、強い把持力を実現できます。ただし、油の温度変化によるアクチュエータの速度変化には注意が必要です。
電動グリッパ(チャック)
サーボモーターの駆動によって、ロボットハンドのツメを開閉します。掴みたい物体が軽量の場合は2本ツメタイプで十分です。ただし、サイズの大きいものや形状が複雑な物体を取り扱う時には、ツメの本数が多いタイプを選択した方が、安定感があります。

組み合わせ
上記のロボットハンドを単体で使うのではなく、組み合わせて使用することも可能です。
例えば、ワークを持ち上げるときには真空吸着を使用し、落下防止として把持ハンドを設けるなどカスタマイズができます
3.搬送用ロボットハンドのオプション
ロボットハンドにはオプションとして以下のようなデバイスが存在します。
グリッパ
グリッパとは、物体を掴んだり離したりする機構で、指や爪などで構成されます。産業用ロボットでは、2爪グリッパもしくは3爪グリッパを使用することが多いです。2爪グリッパは立方体の物体を掴むのに適しており、3爪グリッパは円筒状の物体を掴むのに適しているといえます。
ツールチェンジャ
産業用ロボットがさまざまな作業を行うためには、ツールやハンドの交換が必要です。ツールチェンジャとは、ロボットアームに設置されたハンドやツールを自動で交換するための装置です。ツールチェンジャを活用すれば、1台のロボットで多くの動作が可能です。
センサー
産業用ロボットが正常に動作を行うためには、センサーから取得した情報を基に、制御や異常検知をしなければなりません。代表的なセンサーとして、触覚センサーやトルクセンサーがあります。触覚センサーとは、人間の触覚を模倣したセンサで、接触面の圧力と振動を電気信号へ変換する役割があります。トルクセンサーはトルク(回転力)を測定するセンサーのことで、モーターの回転力を測定するために必要なものです。
4.搬送用ロボットハンド選定の注意点
取り扱うワークの種類によって、ロボットハンドの選定方法が変わるので注意しましょう。
金属やプラスチックなどの硬いもの
金属やプラスチックのような硬いワークを搬送する場合、重量や形状を考慮して把持方法を選定する必要があります。重量物を取り扱う場合は把持ハンド、プラスチックのような軽量な物を搬送する場合には、吸着ハンドを利用した方が、作業効率が良いといえます。

スポンジやゴムなど柔らかいもの
スポンジやゴムのような柔らかいものをロボットハンドで掴もうとすると、変形する恐れがあります。そのため、柔らかい物体を扱う場合には、指の本数が多い把持ハンドを利用すると良いでしょう。
紙袋など梱包が崩れやすいもの
粉体が入った紙袋などを真空吸着で把持すると、吸着が不安定になり、最悪の場合は落下して紙袋の中身が飛散します。壊れやすいものを取り扱う場合は、フローティング機構を設けたり、落下防止のためにハンドの形状をクシ状にする工夫が必要です。

表面が滑りやすいもの
表面が滑りやすい物体を扱う場合、グリッパーの爪の材質や形状を考慮しましょう。また、溶射やローレットといった特殊な表面処理を施すことで、滑りにくい把持が可能になります。
5.産業用ロボットハンドの精度をあげるための技術
ロボットハンドの精度を上げるための技術として、IoT、人工知能(AI)、画像解析技術が挙げられます。
IoTとの連携
IoT (Internet of Things)とは、身の回りのモノをインターネットと接続するシステムのことを指します。産業用ロボットのIoT化によって、インターネットでの管理が可能となり、ロボットの稼働状況の見える化が可能です。

カメラによる画像解析
画像処理技術によって、自動認識や自動検査が可能になります。撮影した画像データから製品の形状や位置の検出もできるため、位置決め作業の自動化もできます

6.産業用ロボットハンドのよくある質問
Q1:ハンドの駆動にはどのような方式がありますか
A1:ハンドの駆動には様々な方式がありますが、代表的なものをご紹介します。
- 空気圧の大きさを変えることで把持力を調整するエアチャック
- モーターによって指の開閉を行う方式
- パッド内を真空状態にして物体を吸着させる方法
Q2:ロボット搬送を検討しているが対象ワーク用のハンドを検討してほしい
A2:ロボットハンドの選定は、取り扱う製品の形状、重量、素材によって異なってきます。弊社では対象ワークの材質、形状やタクトタイム等のご要望にあった最適なロボットハンドをご提案いたしますので、まずはご相談ください。
Q3:設備停電時のワーク落下は防止できますか
A3:停電が発生しても、短時間であればUPS (無停電電源装置) を使用すれば、電力の供給ができます。UPSをロボットハンドに接続すれば、把持している物体を落とすことなく、安全です。また、ロボットハンドにメカニカルロック機能を追加する方法もあります。
7.名古屋精工の強み
名古屋精工の強みは、1957年の創業以来培われた経験豊富な製造ノウハウ、急ぎの案件に対応できる柔軟性、構想設計からメンテナンスまで一貫対応が可能な点にあります。多業種に対応し、工程改善や品質安定化といった課題解決に取り組んでいます。また、直接現場を訪問してお客様の声を聞き、リードタイム短縮に努めています。専用機の改造や追加設備との連携もスムーズに行えるため、将来起こり得る変更や不具合にも柔軟に対応できます。

8.名古屋精工の実績紹介
落下防止(デパレタイズ用)

袋物デパレタイズ用ハンドです。
真空吸着により袋面を把持しますが、移載動作中に意図しない吸着破壊によりワーク落下すると、外袋が破れ内容物が飛散します。
ワークを抱え込むことにより不用意な落下を防止します。
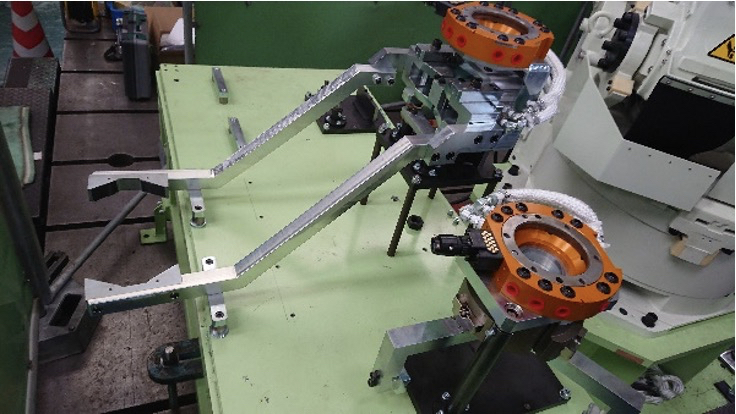
チューブ把持
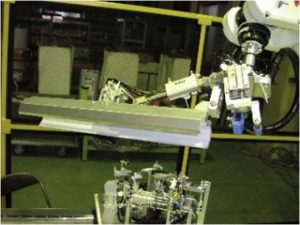
長尺の軟質ゴムなどを把持するのに適しています。
ワークがダレないよう先端把持後に鞘に収めて移載します。
マテハンローディング

円柱・直方体の鋼材を把持するのに適しています。
高性能電磁石により強力に吸着把持します。
またUPSを併用することにより瞬停時の落下を防止します。
熱間鍛造ハンドリング
1000℃の熱間鍛造品を把持できます。
把持部をオフセット・斜角を付けることにより 狭いプレス金型内への供給・取出しが容易になります。
9.産業用ロボットハンドを使った専用機の製作は名古屋精工にお任せください
名古屋精工では構想設計、詳細設計、制御設計、製造、試運転調整、据え付け、サポートまで一貫して対応しています。
これまでの豊富な実績を通して、お客様の課題に向き合い、ご要望にお応えします。
専用機の製造なら、ぜひ名古屋精工にお任せください。
